
Após os problemas registados em Agosto de 2014 com o lançamentos dos dois primeiros satélites da fase FOC, a União Europeia volta ao caminho da sua futura independência no que diz respeito à utilização da georreferênciação espacial com o lançamento de dois novos satélites de navegação Galileo. O lançamento dos dois novos satélites Galileo da fase FOC (Full Operational Capability) foi realizado pela Arianespace a partir do CSG Kourou (Sinnamary) às 2146:18,522UTC do dia 27 de Março de 2015 pelo foguetão Soyuz-STB/Fregat-MT (T15000-008/133-02) na missão VS11.
Os dois satélites colocados em órbita têm uma massa de 730 kg cada um e irão operar numa órbita com uma altitude média de 23.522 km com uma inclinação de 55,04º. No total serão colocados em órbita 22 satélites da série FOC.
Lançamento
Todas as fases do lançamento dos satélites de navegação Galileo-FOC FM03 (Adam) e Galileo-FOC FM04 (Anastasia), decorreram sem problemas. Após deixar a plataforma de lançamento, a fase propulsiva dos três estágios do lançador Soyuz teve uma duração de nove minutos. De seguida, o sistema compósito superior separou-se do estágio Blok-I e iniciou a sua primeira queima, colocando-se de seguida numa lenta rotação para estabilizar o sistema enquanto permanecia numa fase balística com uma duração de 3 horas e 15 minutos. Uma segunda queima elevou a órbita do conjunto para realizar uma terceira queima para circularizar essa órbita, com os satélites a separarem-se pouco depois. No final da missão o estágio Fregat foi colocado em modo passivo e os dois satélites manobram para atingir as suas órbitas operacionais.
O foguetão Soyuz-STB/Fregat-MT (E15000-006/1039) havia sido colocado na plataforma de lançamento ELS no dia 24 de Março e a carenagem contendo os dois satélites foi transportada para a zona de lançamento a 25 de Março, sendo integrada no lançador.
No dia do lançamento, a T-4h 50m teve início a reunião da Comissão Estatal para autorizar o abastecimento do lançador. Este processo tem início a T-4h e as operações terminam a T-1h 35m. A T-1h 10m procede-se à remoção da plataforma de acesso móvel ao lançador. Durante os 60 minutos seguintes todos os sistemas do foguetão, dos dois satélites, da estrutura de apoio no solo e do centro de lançamento são cuidadosamente analisados.
A chave de lançamento é colocada na posição de lançamento a T-5m 10s e a T-5m o estágio superior Fregat-MT começava a receber energia das suas fontes internas. O comando de separação do sistema umbilical do sistema compósito superior é enviado a T-2m 25s. O mastro de fornecimento de energia ao lançador é removido a T-28s e a ignição do primeiro estágio ocorre a T-17s, atingindo o nível de força preliminar a T-15s e a potência máxima a T-3s, com o veículo a abandonar a plataforma de lançamento a T=0s.
Os quatro propulsores laterais que constituem o primeiro estágio do lançador separam-se a T+1m 58s, enquanto que a carenagem de protecção separa-se a T+3m 29s. Quando se dá a separação dos quatro propulsores laterais, o estágio central continua em ignição, terminando a T+4m 48s. O terceiro estágio (Blok-I) entra então em ignição colocando o veículo numa trajectória sub-orbital. O Blok-I termina a sua queima T+9m 24s.
A seguinte fase propulsionada do lançamento estará a cargo do estágio superior Fregat-MT. Este inicia a primeira de duas queimas a T+10m 24s, terminando a T+23m 32s e iniciando a fase balística. A segunda queima do Fregat-MT terá lugar entre T+3h 38m 35s e T+3h 42m 57s.
A separação dos dois satélite ocorre de forma simultânea a T+3h 47m 57s.
O sistema de navegação europeu Galileo
O Programa Galileo é um programa europeu que vai permitir à União Europeia permitir ter o seu próprio sistema de navegação que suporta múltiplas aplicações. Ao contrário do sistema de navegação norte-americano, o sistema Galileo está sob controlo civil e irá garantir serviços de localização de alta-precisão, independentemente de outros serviços de navegação por satélite, em particular do sistema GPS/Navstar.
O sistema Galileo irá oferecer cinco serviços globais distintos: serviço aberto, serviço comercial, serviço de segurança de vida, serviço público regulado, e serviço de busca e salvamento.
O programa Galileo irá permitir à União Europeia lidar com os desafios estratégicos, económicos, industriais e sociais inerentes do rápido crescimento das tecnologias espaciais de posicionamento e temporização.
Os satélites Galileo-FOC
Os satélites Galileo-FOC são construídos pela OHB-Systems (plataforma) e pela SSTL (carga de navegação). No lançamento os satélites têm uma massa de 733 kg , sendo as suas dimensões de 2,5 x 1,2 x 1,1 metros, e tendo uma envergadura de 14,67 metros em órbita. O tempo de vida útil será superior a 12 anos. Os satélites operam em três bandas (E5, E6 e E1), transportando também equipamento de busca e salvamento do sistema COSPAS SARSAT.
A validação do sistema
Os primeiros elementos orbitais do sistema de navegação europeu foram constituídos por quatro satélites que fizeram parte da fase In-Orbit Validation (IOV) que foi o núcleo operacional de uma constelação de 30 satélites.
Similares aos restantes satélites que serão colocados em órbita, os primeiros quatro satélites provaram que os satélites e o elemento no solo cumpriam muitos dos requisitos do sistema Galileo e validaram o desenho do sistema antes da finalização e do lançamento do resto da constelação.
Cada satélite IOV tinha uma massa de 640 kg tendo as dimensões 3,02 x 1,58 x 1,59 m (na posição de armazenamento) e 2,74 x 14,50 x 1.59 m (com os painéis solares abertos). A bordo transportavam uma carga com dois relógios atómicos PHM (Passive Hydrogen Maser), dois relógios atómicos de rubídio, uma unidade de monitorização e de controlo dos relógios, uma unidade geradora de sinal de navegação, uma antena de banda L para a transmissão do sinal de navegação, uma antena de banda C para detecção de sinal, duas antenas de banda S para telemetria e telecomandos, e uma antena de busca e salvamento. Os painéis solares forneciam 1.420 watts de energia em exposição directa e 1.355 watts em eclipse. A vida operacional de cada satélite é superior a 12 anos. Os satélites são controlados a partir do Centro de Controlo Galileu em Fucino, Itália.
Os satélites FOC são fabricados pela OHB-System (plataforma) e pela SSTL (carga). As suas dimensões são 2,5 x 1,2 x 1,1 metros e com uma envergadura em órbita de 14,67 metros. O seu tempo operacional é de 12 anos.
Objectivos
Sendo o resultado da primeira cooperação entre a Comissão Europeia e a ESA, o sistema de navegação Galileo composto por 30 satélites irá fornecer serviços de posicionamento, navegação e temporização de alta precisão em todo o globo como um serviço civil oferecendo a garantia de uma cobertura contínua.
A fase de desenvolvimento e IOV do sistema Galileo teve início em finais de 2003. Esta fase teve como objectivo levar a cabo a validação orbital do sistema utilizando uma constelação reduzida de quatro satélites IOV – sendo este o número mínimo para garantir a provisão de um posicionamento e temporização exactos em determinadas localizações teste – em combinação com a rede de estações terrestres Galileu.
Assim, os quatro satélites iniciais levaram a cabo um papel duplo, servindo como validação geral do sistema enquanto fazendo parte da constelação operacional.
Após o lançamento dos satélites IOV, a estação de rastreio da ESA em Redu, Bélgica, é empregada primeiramente para a fase Launch and Early Phase (LEOP) e depois, uma vez operacionais os quatro satélites, para o programa In-Orbit Test (IOT). Este programa verificou a performance da carga de navegação para o sinal de navegação: tanto a transmissão do satélite para os utilizadores (downlink) como a recepção (uplink) vinda do Galileo’s Ground Mission Segment para os satélites e retransmissão para os utilizadores.
Os resultados foram cruciais para o sucesso do sistema Galileu, sendo utilizados para estabelecer referências para as suas vidas operacionais e utilizados como referência ao longo de toda a constelação Galileu.
Como funciona a navegação por satélite?
As balizas de navegação devem ser o mais visível possível. Assim, as torres de navegação por rádio que guiavam os aviões tinham centenas de metros de altura, enquanto que os faróis marítimos que guardam as linhas costeiras atingem dezenas de metros de altura ou estão colocados em terrenos elevados. Em essência, passa-se o mesmo com os satélites de navegação que se encontrando em órbita são visíveis de qualquer parte da Terra.
Transformando o tempo em distância
 O sinal emitido por cada satélite é uma microonda de rádio contendo o tempo no qual foi transmitida e a actual posição orbital do satélite. À medida que os sinais viajam à velocidade da luz, então (se o nosso registo de tempo é suficientemente preciso) ao calcular a diferença de tempo entre o sinal do satélite e o seu receptor, podemos derivar a distância precisa que o sinal viajou desde o satélite até atingir o nosso receptor.
O sinal emitido por cada satélite é uma microonda de rádio contendo o tempo no qual foi transmitida e a actual posição orbital do satélite. À medida que os sinais viajam à velocidade da luz, então (se o nosso registo de tempo é suficientemente preciso) ao calcular a diferença de tempo entre o sinal do satélite e o seu receptor, podemos derivar a distância precisa que o sinal viajou desde o satélite até atingir o nosso receptor.
A navegação ultra precisa por satélite tem por base os mesmos princípios básicos da contagem de segundos após um relâmpago antes da chegada do trovão, de forma a estimar a distância à qual se encontra a tempestade: um valor temporal é convertido numa distância.
Determinando a nossa posição
Combinam-se sinais de múltiplos satélites de forma simultânea – tal como observando vários faróis ao mesmo tempo – e determina-mos a nossa posição. A combinação de um maior número de sinais permite uma maior precisão, mas quatro sinais é um mínimo absoluto necessário. Três sinais são utilizados para executar uma «trilateralização» (o equivalente tridimensional da triangulação) da longitude, latitude e altitude do utilizador, enquanto que o quarto sinal é utilizado para determinar o deslocamento de tempo entre o satélite (preciso) e o relógio (menos preciso) no receptor.
O segmento espacial e terrestre
 Vários aspectos levaram a que a órbita terrestre média fosse considerada como a órbita preferencial para os satélites de navegação, tal como acontece com o sistema GPS norte-americano e GLONASS russo. Existem sólidas razões práticas para tal: as órbitas terrestres médias são relativamente estáveis e os satélites movem-se no céu relativamente lentos. As órbitas mais baixas iriam requerer mais satélites para manter a mesma cobertura enquanto que órbitas mais elevadas iriam reduzir a extensão da cobertura.
Vários aspectos levaram a que a órbita terrestre média fosse considerada como a órbita preferencial para os satélites de navegação, tal como acontece com o sistema GPS norte-americano e GLONASS russo. Existem sólidas razões práticas para tal: as órbitas terrestres médias são relativamente estáveis e os satélites movem-se no céu relativamente lentos. As órbitas mais baixas iriam requerer mais satélites para manter a mesma cobertura enquanto que órbitas mais elevadas iriam reduzir a extensão da cobertura.
Adicionalmente, uma extensiva infra-estrutura no solo distribuída por todo o mundo é necessária para o envio dos sinais de navegação, para manter os diferentes relógios da constelação sincronizados e para corrigir qualquer desvio temporal ou posicional a bordo.
Os receptores dos utilizadores
Os receptores de sinais de navegação por satélite também levam a cabo muito trabalho, contendo ‘efemérides’ ou almanaques electrónicos que registam as esperadas localizações da constelação, para reduzir o tempo necessário para adquirir fixações nos sinais de minutos para alguns segundos.
Os sinais de navegação por satélite são muito ténues, equivalentes ao brilho de uma luz de um carro de uma ponta da Europa para a outra. Os sinais são baseados em torno de códigos numéricos pseudo-aleatórios que identificam cada satélite na constelação. Os receptores têm registos de cada um destes códig os complexos, para que uma réplica possa ser gerada no receptor a partir do fraco sinal recebido e utilizado em cálculos dos dados finais de navegação que são exibidos ao utilizador.
os complexos, para que uma réplica possa ser gerada no receptor a partir do fraco sinal recebido e utilizado em cálculos dos dados finais de navegação que são exibidos ao utilizador.
Os serviços da navegação por satélite da Europa
A constelação completa dos satélites Galileu será composta por 27 satélites activos mais 3 satélites suplentes que circulam a Terra em órbitas médias a uma altitude de 23.222 km. O sistema Galileu será interoperacional com o sistema GPS e com o sistema GLONASS, oferecendo assim uma performance melhorada.
Construindo sobre o sucesso do EGNOS
O primeiro pilar do programa de navegação europeu, o European Geostationary Navigation Overlay Service (EGNOS), está já operacional, é um sistema baseado numa rede de estações terrestres e três satélites geostacionários. As estações reúnem dados sobre a actual precisão dos sinais do sistema GPS e integra-os no sinal EGNOS, que é enviado para os satélites para ser transmitido aos utilizadores.
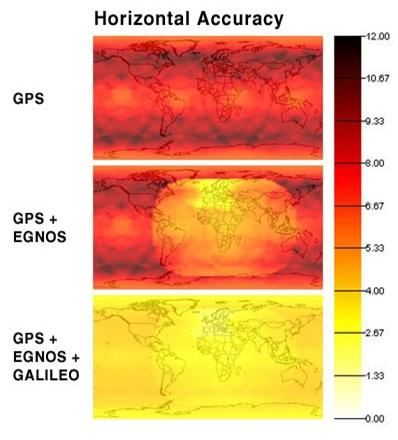 O EGNOS serve para refinar a precisão dos sinais GPS em toda a Europa e para informar os utilizadores acerca do actual nível de fiabilidade do sistema.
O EGNOS serve para refinar a precisão dos sinais GPS em toda a Europa e para informar os utilizadores acerca do actual nível de fiabilidade do sistema.
Desenhado tendo em conta os standards estabelecidos pela International Civil Aviation Organisation (ICAO), o EGNOS começou a oferecer o seu Serviço Aberto para os utilizadores em Outubro de 2009, com o seu Safety-of-Life Service a tornar-se disponível para a navegação de aeronaves (começando com a orientação vertical para as aproximações em aterragem) em Março de 2011.
Oferta de serviços
Uma vez operacional o sistema Galileu, um portefólio de serviços de navegação será oferecido pelo Galileu e pelo EGNOS, tendo por base as diferentes necessidades do utilizador:
• Serviço Aberto – o sinal de navegação galileu estará acessível ao público em geral de forma gratuita, fornecendo um posicionamento global melhorado;
• Serviço Público Regulado – dois sinais encriptados com acesso controlado para utilizadores específicos tais como corpos governamentais;
• Serviço de Busca e Salvamento – o serviço galileu irá contribuir para o sistema internacional COSPAS-SARSAT de busca e salvamento. Um sinal de socorro será transmitido para o Centro de Coordenação de Salvamento e o sistema Galileu irá informar o utilizador de que a sua situação foi detectada;
• Serviço Segurança-de-Vida – já disponível para a aviação tendo por base os standards ICAO graças ao EGNOS. O sistema Galileu irá melhorar a performance do serviço.
• Serviço Comercial – o sistema galileu irá proporcionar um sinal de produção de alto volume de dados e dados de alta precisão autenticados que é de interesse particularmente para os utilizadores profissionais.
Uma parte crucial do dia-a-dia
A navegação por satélite tornou-se rapidamente uma parte crucial do quotidiano. Com sinais a serem enviados por satélites em órbita, qualquer um com um receptor pode determinar a sua localização tridimensional, abrindo um variado leque de aplicações. Os registos temporais dos sinais também servem para sincronizar as transacções electrónicas globais, tais como trocas inter-bancárias, telecomunicações e redes energéticas.
Os primeiros passos
O enorme potencial dos benefícios da navegação por satélite juntou a Comissão Europeia e a ESA numa estreita colaboração. Nos anos 90 as duas organizações concordaram no desenvolvimento de um equivalente civil do sistema GPS para que a Europa pudesse ser autónoma nos cruciais sectores estratégico e comercial.
A ESA iniciou as pesquisas e desenvolvimento em cooperação com a Comissão Europeia e a comunidade da aviação civil. A estratégia de desenvolvimento foi concebida com dois pilares principais:
• EGNOS (European Geostationary Navigation Overlay Service) – um sistema de ampliação pan-europeu, complementando o sistema GPS para oferecer uma maior fiabilidade e integridade de informação aos utilizadores.
• Galileu – um sistema de navegação por satélite inteiramente autónomo e interoperacional, transmitindo sinais globais de navegação para serviços de alta performance, possuindo o serviço garantias de integridade que faltam ao serviço GPS para serviços comerciais e de segurança críticos.
EGNOS, uma realidade
Actualmente o EGNOS já está operacional: o seu Serviço Aberto, para aplicações onde a vida humana não está em risco – tais como navegação pessoal, transacção de bens e agricultura de precisão – está disponível desde Outubro de 2009.
O EGNOS’ Safety-of-Life Service, onde a segurança do transporte aéreo depende da precisão e integridade dos sinais, ficou disponível para o seu propósito primário de navegação aérea (iniciando com a orientação vertical para as aproximações em aterragem) em Março de 2011.
Prova do conceito Galileu
A ESA e a Comissão Europeia tiveram uma aproximação desconcertada no desenvolvimento do sistema Galileu. A ESA iniciou a sua Galileo System Test Bed Version 1 em 2002. Esta instalação realizou testes dos algoritmos de determinação orbital, integridade e sincronização temporal utilizando satélites GPS e um segmento de solo experimental que consistiu numa rede global de estações sensoriais.
Uma estação EPTS (Experimental Precision Timing Station) localizada no Laboratório do Tempo do Instituto Nacional Electrónico de Turim, Itália, forneceu a escala temporal referencial necessária, sincronizada com o tempo universal e com o tempo atómico internacional (UTC/TAI), e um Centro de Processamento localizado no centro técnico da ESA em Noordwijk, Holanda. Este último foi utilizado para a geração de produtos base de navegação tendo por base algoritmos semelhantes aos que são utilizados no Galileu.
Os testes levados a cabo com o satélite GSTB-V1 provaram o conceito base do Galileu: que era de facto possível ‘transmitir’ dados de determinação orbital e de sincronização temporal numa alta precisão sub-métrica com um nível de actualização inferior a duas horas, tal como se prevê com o sistema Galileu.
A caminho da órbita terrestre
O passo seguinte era testar em voo os elementos do sistema Galileu. Foram construídos em paralelo dois satélites Galileo In-Orbit Validation Element (GIOVE) com capacidades complementares para fornecer redundância.
O satélite GIOVE-A foi lançado desde o Cosmódromo GIK-5 Baikonur em Dezembro de 2005. Construído para a ESA pela britânica Surrey Satellite Technology Ltd, o satélite foi equipado com uma antena de elementos individuais de banda L para «iluminar» a Terra visível em baixo, o seu sinal – o primeiro sinal de navegação europeu no espaço – sendo guiado por dois relógios de rubídio muito estáveis.
O satélite também transportou dois tipos de detectores de radiação para analisar o hostil ambiente espacial da órbita terrestre média, que passa pela cintura de van Allen exterior. O GIOVE-A possuía uma versão do segmento de solo do Galileu, que serviu para demonstrar que as suas assumpções do seu desenho básico eram robustas. Os sinais do satélite foram também utilizados para testes com o GPS para demonstrar a interoperabilidade dos dois sistemas.
O satélite GIOVE-B foi lançado desde o Cosmódromo GIK-5 Baikonur em Abril de 2008. Construído por um consórcio entre a Astrium e a Thales Alenia Space, o GIOVE-B possuía uma antena de elementos de banda L, uma unidade de geração de sinal capaz de produzir novos tipos de sinais, um novo sensor de radiação e um excepcionalmente estável relógio atómico maser de hidrogénio – o mais avançado relógio alguma vez voado para propósitos de navegação – bem como um relógio suplente de rubídio.
Ambos os satélites ainda estão operacionais e continuam a levar a cabo uma observação contínua do fluxo de radiação da órbita média ao longo do ciclo solar de 11 anos. As suas órbitas estão a ser ajustadas para dar lugar à constelação Galileu operacional, começando com os satélites IOV.
Os relógios do sistema Galileu
 Os relógios de alta precisão do sistema Galileu são o próprio coração desse sistema. Cada satélite emite um sinal contendo a hora na qual foi transmitido e a posição orbital do satélite. Devido a conhecermos a velocidade da luz, o tempo que o sinal demora a atingir um receptor no solo pode ser utilizado para calcular a distância para o satélite.
Os relógios de alta precisão do sistema Galileu são o próprio coração desse sistema. Cada satélite emite um sinal contendo a hora na qual foi transmitido e a posição orbital do satélite. Devido a conhecermos a velocidade da luz, o tempo que o sinal demora a atingir um receptor no solo pode ser utilizado para calcular a distância para o satélite.
O tempo do sistema tem de ser preciso a uma escala de nanossegundos – para que a distância possa ser derivada a um alto grau de confiança. Combinam-se de forma simultânea os sinais provenientes de diferentes satélites e a posição do utilizar é indicada: o objectivo do sistema Galileu é o de proporcionar uma precisão de 1,0 metros uma vez completado todo o sistema.
Todos os relógios têm por base oscilações regulares – tradicionalmente o balanço de um pêndulo, uma engrenagem mecânica ou a pulsação de um cristal de quartzo. Os relógios atómicos altamente fiáveis têm por base a troca entre estados de energia de um escudo de electrões de um átomo, induzida pela luz, energia laser ou maser – se se força os átomos a «saltar» de um estado de energia particular para outro, irá radiar um sinal de microondas associado numa frequência altamente estável.
O relógio maser de hidrogénio passivo é o relógio principal a b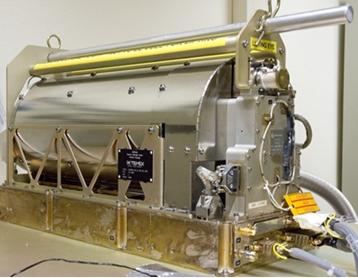 ordo de cada satélite. É um relógio atómico que utiliza a ultra estável transição de 1,4 GHz num átomo de hidrogénio para medir o tempo com uma precisão de 0,45 nanossegundos em 12 horas. Um relógio de rubídio será utilizado como suplente, sendo tecnologicamente independente. A sua precisão é de 1,8 nanossegundos em 12 horas. Versões protótipo destes relógios foram já lançadas a bordo dos satélites GIOVE.
ordo de cada satélite. É um relógio atómico que utiliza a ultra estável transição de 1,4 GHz num átomo de hidrogénio para medir o tempo com uma precisão de 0,45 nanossegundos em 12 horas. Um relógio de rubídio será utilizado como suplente, sendo tecnologicamente independente. A sua precisão é de 1,8 nanossegundos em 12 horas. Versões protótipo destes relógios foram já lançadas a bordo dos satélites GIOVE.
Desenhando relógios atómicos para o espaço
O primeiro relógio atómico, desenvolvido na Inglaterra em 1955, tinha o tamanho de uma sala. Para a navegação por satélite, o desafio era o de criar um desenho que fosse suficientemente compacto e robusto para voar no espaço.
Tendo por base as pesquisas e o desenvolvimento da ESA desde o princípio dos anos 90, foram desenvolvidas e qualificadas em separado, duas tecnologias de relógios atómicos na Europa e que foram mais tarde declaradas aptas para o ambiente hostil do espaço a bordo dos satélites GIOVE.
O relógio maser de hidrogénio passivo
O relógio maser de Hidrogénio passivo do tamanho de uma secretária é composto por um sistema de ressonância atómico e os dispositivos electrónicos associados. Uma pequena garrafa de armazenamento fornece o hidrogénio molecular a uma lâmpada de gás de descarga. Aqui, as moléculas de hidrogénio são divididas em átomos individuais.
Após a dissociação, os átomos entram numa cavidade de ressonância após passarem por um seleccionador de estado magnético, utilizado para admitir somente os átomos com o nível de energia desejado. Na cavidade de ressonância, os átomos estão confinados no interior de uma lâmpada de armazenamento quartzo. No seu interior, os átomos de hidrogénio tendem a retornar ao seu estado ‘fundamental’ de energia, emitindo uma frequência de microondas à medida que o fazem. Esta frequência é detectada por um circuito que sintoniza um sinal externo à transição ‘natural’ dos átomos de hidrogénio, amplificando o sinal de microondas.
A frequência de ressonância da cavidade de microondas é aproximadamente 1,420 GHz. Os sistemas electrónicos do relógio incluem circuitos para o controlo da frequência juntamente com o sistema de controlo térmico para manter a cavidade de ressonância à temperatura correcta.
O sistema de ressonância atómico é muito sensível ao seu ambiente externo. É necessário um grande cuidado para evitar distúrbios ambientais, tais como calor, magnetismo e radiação, mantendo-os no mínimo para que seja possível a performance potencial total destes relógios sofisticados.
O relógio de rubídio
O relógio de rubídio, mais pequeno, segue o mesmo princípio básico, com os átomos de rubídio a serem libertados para uma célula de vapor no interior do sistema de ressonância atómico. No seu interior, os átomos são estimulados pela luz de uma descarga de uma lâmpada de rubídio; um fotodíodo regista os níveis de luz que passam através da célula. Os átomos excitados retornam ao seu nível de excitação inferior após o qual são transferidos para um nível intermédio utilizando energia de microondas a uma frequência precisa. Neste estado intermédio, a sua absorção de luz é maximizada. O fotodíodo é fixado a sistemas de controlo que sintonizam a microonda apara manter o nível máximo de absorção.
A lâmpada de descarga de rubídio faz com que o rubídio volte ao seu estado mais elevado, a partir do qual decai, reiniciando o processo.
O sistema de tempo Galileo
Ambos os relógios atómicos Galileu são muito estáveis em poucas horas. Porém, se os relógios são deixados correr indefinidamente a contagem do tempo irá desviar-se, necessitando então de ser sincronizados de forma regular com uma rede de relógios de referência ainda mais precisos no solo. Estes incluem relógios baseados em frequências standard de césio, que mostram uma melhor estabilidade a longo prazo do que os relógios de rubídio ou de hidrogénio passivo.
Estes relógios no solo – mantidos em conjunto em instalações paralelas nas Instalações de Tempo Precisas, em Fucino, e nos Centros de Controlo Galileu em Oberpfaffhofen, também geram uma referência temporal mundial denominada Galileo System Time (GST), o tempo standard para o sistema Galileu, preciso a 28 bilionésimos de segundo.
Tecnologias de apoio
Em paralelo, foi desenvolvido um sistema para a geração de sinais de navegação, com um gerador de sinais de navegação, uma antena de navegação e o equipamento associado.
Anatomia dos satélites
Cada satélite contém todo o equipamento necessário para levar a cabo as suas tarefas de navegação e de temporização ao longo da sua vida útil de 12 anos.
Recebendo energia de dois painéis solares, com os seus componentes internos cuidadosamente protegidos contra as radiações que prevalecem na órbita terrestre média, cada satélite transporta:
• Antena de banda L – transmite o sinal de navegação em banda L.
• Antena de busca e salvamento – capta sinais de socorro a partir de balizas na Terra e transmite esses sinais para uma estação no solo para envio aos serviços de socorro locais.
• Antena de banda C – recebe sinais contendo dados da missão provenientes estações no solo. Estes incluem dados para sincronizar os relógios de bordo com uma referência do solo e dados de integridade que contêm informação acerca do bom funcionamento de cada satélite. Esta informação de integridade está incorporada no sinal de navegação para ser transmitida aos utilizadores.
• Duas antenas de banda S – parte do subsistema de telemetria, rastreamento e comando. Estas antenas transmitem dados de manutenção acerca da plataforma e da carga do satélite para o Segmento do Controlo do Solo do Sistema Galileu e, por sua vez, recebe comandos para controlar o satélite e operar a sua carga.
• Sensores terrestres de infravermelhos e sensores solares de luz visível – estes sensores mantêm o satélite orientado para a Terra. Os sensores de infravermelhos detectam o contraste entre o frio do espaço e o calor da atmosfera terrestre. Os sensores solares são detectores de luz visível que medem o ângulo em relação ao Sol.
• Retro-reflector laser – permite a medição da altitude do satélite com uma margem de alguns centímetros ao reflectir um raio laser emitido por uma estação terrestre. O reflector será utilizado cerca de uma vez por ano, devido ao facto de que as medições de altitude através da antena de banda S são suficientemente precisas.
• Radiadores espaciais – expelem o excesso de calor para o espaço para manter os dispositivos a bordo dentro dos limites de temperatura operacionais.
• Relógio maser de hidrogénio passivo – é o principal relógio no satélite. São transportados dois relógios para uma maior redundância. Este relógio atómico utiliza as oscilações ultra-estáveis de um átomo de hidrogénio para medir o tempo com um erro de 0,45 nanossegundos em 12 horas.
• Relógio de rubídio – um relógio atómico mais pequeno baseado numa tecnologia diferente, garantindo a redundância aos masers. São transportados dois destes relógios com uma precisão de 1,8 nanossegundos em 12 horas.
• Unidade de monitorização e controlo dos relógios – proporciona a interface entre os quatro relógios e a unidade de geração do sinal de navegação. Também garante que as frequências produzidas pelo relógio principal e o suplente activo se encontram em fase, para que o suplente possa substituir o principal de forma instantânea caso este tenha alguma falha.
• Unidade de geração do sinal de navegação – gera os sinais de navegação utilizando os dados da unidade de controlo e de monitorização dos relógios e os dados de navegação e de integridade enviados da Terra e recebidos na antena de banda C. Os sinais de navegação são convertidos para a banda L para serem transmitidos para os utilizadores.
• Giroscópios – medem a rotação do satélite.
• Rodas de reacção – controlam a rotação do satélite. Quando elas rodam, também o satélite roda – na direcção oposta. O satélite roda duas vezes por órbita para permitir que os painéis solares estejam voltados para o Sol.
• Magnetotorques – modificam a velocidade de rotação das rodas de reacção ao introduzirem um torque magnético na direcção oposta.
• Unidade de distribuição e condicionamento de energia – regula e controla a energia proveniente dos painéis solares e baterias para distribuição para todos os subsistemas e carga.
• Computador de bordo – controla a plataforma do satélite e a sua carga.
Galileo no solo
Existe muito mais do sistema Galileu do que somente os seus satélites no espaço. Uma rede global é necessária para garantir a continuada fiabilidade da informação sobre o tempo e o posicionamento embebida nos sinais vindos de órbita.
Mantendo os satélites a horas e em linha
A navegação por satélite parte da derivação do tempo e da localização no espaço por parte do receptor de um sinal transmitido com um alto nível de precisão. Esta informação está embebida no próprio sinal do satélite. Mas o relógio atómico a bordo de um satélite pode assim mesmo variar – e somente um erro de um bilionésimo de segundo representa um aumento de 0,3 metros no erro. Um erro de um segundo iria colocar o utilizador a 300.000 km de distância do seu ponto actual.
Assim, uma rede de estações no solo verifica constantemente o tempo do relógio de cada satélite em relação ao sistema GST. Tendo uma precisão de 28 bilionésimos de segundo, o GST é gerado pelas Instalações de Tempo Preciso nos Centros de Controlo Galileu em Fucino e em Oberpfaffenhofen, que são por sua vez comparados no seu alinhamento pelo tempo UTC por um grupo de laboratórios de tempo europeus.
A órbita do satélite também pode derivar, alterada pelo campo gravitacional da Terra devido à ligeira protuberância equatorial do planeta e devido à influência da Lua e do Sol. Mesmo o pequeno mas contínuo fluxo de luz solar pode afectar as órbitas dos satélites. Assim, as estações terrestres colocadas em torno do globo e que captam os sinais dos satélites Galileu, fazem a determinação da distância via rádio para determinar a posição dos satélites e determinar alguma deriva orbital.
A informação sobre a performance do relógio dos satélites e as posições, é reunida para que uma mensagem de correcção possa ser enviada para os satélites para ser retransmitida para os utilizadores no sinal do próprio satélite. Assim, fechando o ciclo desta forma significa que a óptima performance pode ser mantida ao longo do tempo. A qualidade e a fiabilidade de cada sinal Galileu são assim também verificadas a nível individual.
O segmento de solo Galileu
Necessariamente, o Segmento de Solo Galileu é um dos desenvolvimentos mais complicados levados a cabo pela Europa, tendo de cumprir níveis estritos de performance e segurança.
• Ground Mission Segment (GMS) – tem de fornecer uma performance de navegação avançada a alta velocidade a qualquer hora, processando dados enviados por uma rede global de estações. O GMS tem dois milhões de linhas de código, 500 funções internas, 400 mensagens e 600 sinais a circular por 14 diferentes elementos.
• Groung Control Segment (GCS) – monitoriza e controla a constelação de satélites com um alto grau de automação.
• Estações de telemetria, rastreamento e comando – duas estações em Kiruna, Suécia, e Kourou, Guiana Francesa.
• Estações de uplink – uma rede de estações para o envio de dados de navegação e integridade.
• Estações sensor – uma rede global que proporciona uma cobertura para a sincronização de relógios e medições orbitais.
• Rede de disseminação de dados – uma rede de interconecta todas as instalações Galileu,
Durante a fase IOV o GMS esteve localizado no Centro de Controlo de Fucino e no GCS no Centro de Controlo em Oberpfaffenhofen. Actualmente os dois centros abrigam instalações equivalentes, trabalhando em conjunto como suplentes com uma sincronização de dados em tempo real. Na possibilidade de perda de um dos centros, o outro será capaz de continuar as operações de forma contínua.
Os parceiros Galileu
A construção do sistema de navegação da União Europeia é uma tarefa complexa e um esforço multi-facetado envolvendo muitos parceiros em todo o continente.
Parceiros públicos
A definição, desenvolvimento e fase IOV do programa Galileu são levadas a cabo pela ESA e co-financiadas pela Comissão Europeia. A fase subsequente (Full Operational Capability – FOC) é gerida e financiada pela Comissão Europeia.
Parceiros industriais
Os satélites IOV foram fornecidos pela EADS Astrium que liderou um consórcio de empresas com a Thales Alenia Space Italy que foi responsável pela integração dos satélites e a EADS Astrium UK que forneceu as cargas. Para os próximos satélites, a OHB na Alemanha é a principal contratante com a Surrey Satellite Technology Ltd. a produzir as cargas.
Este ‘segmento espacial’ é somente um dos seis pacotes de trabalho atribuídos à indústria espacial europeia, através do qual o sistema Galileu como um todo será montado:
• WP1 Apoio do sistema: cobre o desenho geral dos sistemas espaciais e de solo juntos e foi assinado com a Thales Alena Space Italy.
• WP2 Segmento de Missão no Solo: cobre as instalações do serviço de navegação, assinado com a Thales Alenia Space France.
• WP3 Segmento de Controlo no Solo: cobre as instalações de controlo dos satélites, assinado com a EADS Astrium.
• WP4 Segmento Espacial: cobre os satélites, assinado com a EADS Astrium para os primeiros quatro satélites, com a OHB/SSTL para os próximos 14 satélites, com os restantes 12 ainda para serem atribuídos.
• WP5 Serviços de Lançamento: cobre o lançamento dos satélites Galileu, assinado com a Arianespace.
• WP6 Operações: cobre o suporte operacional preparatório e contínuo, assinado com a Spaceopal – um consórcio comercial entre a empresa italiana Telespazio e a firma alemã Gesellschaft für Raumfahrtanwendungen (GfR) mbH, que é parte do Centro Aeroespacial Alemão (DLR) – com a Inmarsat que forneceu o apoio para os testes IOV.
O foguetão 14A14 Soyuz-2
 O foguetão 14A14 Soyuz-2 representa a mais recente evolução do épico míssil balístico intercontinental R-7 desenvolvido por Sergei Korolev nos anos 50 do século passado. O novo lançador apresenta motores melhorados, modernos sistemas aviónicos digitais e uma reduzida participação de componentes de fabrico não russo.
O foguetão 14A14 Soyuz-2 representa a mais recente evolução do épico míssil balístico intercontinental R-7 desenvolvido por Sergei Korolev nos anos 50 do século passado. O novo lançador apresenta motores melhorados, modernos sistemas aviónicos digitais e uma reduzida participação de componentes de fabrico não russo.
O lançador é também conhecido pela designação Soyuz-ST (quando lançado desde o CSG Kourou) e foi especialmente desenhado para uma utilização comercial aumentando a sua performance geral apesar de o desenho básico do veículo permanecer o mesmo. As alterações foram realizadas ao nível de uma melhoria da performance dos motores do primeiro e do segundo estágio com novos injectores e alteração da mistura dos propolentes; aumento na performance do terceiro estágio; introdução de um novo sistema de controlo permitindo uma alteração do plano orbital já durante o voo ; introdução de um novo sistema de telemetria digital para a monitorização do lançador e a introdução de uma nova ogiva de protecção de carga com um diâmetro de 3,6 metros.
O foguetão 14A14 Soyuz-2 pode ser equipado com um quarto estágio, nomeadamente o estágio Fregat, utilizando as carenagens de protecção do tipo ST e SF.
Este lançador é capaz de colocar uma carga de 7.800 kg numa órbita terrestre a 240 km de altitude com uma inclinação de 51,80º. No lançamento desenvolve uma força de 4.144.700 kN. A sua massa total é de 310.000 kg, o seu diâmetro no estágio principal é de 2,95 metros e o seu comprimento total é de 43,40 metros.
O primeiro estágio do 14A14 Soyuz-2 é composto pelos quatro propulsores laterais (Blok B, V, G e D) com uma massa bruta de 44.400 kg, tendo uma massa de 3.810 kg sem combustível. Cada propulsor tem um motor RD-107A (14D22) que desenvolve uma força de 1.021.097 kN (vácuo), com um Ies 310 s e um Tq de 120 s. Têm um comprimento de 19,60 metros, um diâmetro de 2,69 metros e consomem LOX e querosene.
O segundo estágio (Blok-A) tem um comprimento de 27,80 metros, um diâmetro de 2,95 metros, um peso bruto de 105400 kg e um peso sem combustível de 6.975 kg. Está equipado com um motor RD-108A que no lançamento desenvolve 999.601 kgf (vácuo), com um Ies de 311 s e um Tq de 286 s. Consome LOX e querosene.
O terceiro estágio (Blok-I) tem um comprimento de 6,74 metros, um diâmetro de 2,66 metros, um peso bruto de 25.200 kg e um peso sem combustível de 2.355 kg. Está equipado com um motor RD-0110 que no lançamento desenvolve 294.000 kgf (vácuo), com um Ies de 359 s e um Tq de 300 s. Consome LOX e querosene.
As modificações introduzidas no novo lançador foram sendo testadas em duas versões do mesmo veículo o 14A14-1A Soyuz-2-1A e o 14A14-1B Soyuz-2-1B. Este último veículo é um lançador a três estágios no qual o motor RD-0124 é já empregado no último estágio.
Com dimensões semelhantes ao motor RD-0110 utilizado nas versões anteriores dos lançadores Soyuz, o motor RD-0124 apresenta como principal diferença a introdução de um sistema de ciclo fechado no qual o gás do oxidante que é utilizado para propulsionar as bombas do motor é então direccionado para a câmara de combustão onde é queimado com restante propolente em vez de ser descartado. Esta melhoria no motor aumenta a performance do sistema e, como consequência, aumenta a capacidade de carga do lançador em 950 kg. Um propolente especial de ignição é utilizado para activar a combustão do motor e são utilizados dispositivos pirotécnicos para controlar o funcionamento do motor. Cada uma das quatro câmaras de combustão pode ser movimentada ao longo de eixos para manobrar o veículo.
Em 1996 tiveram início os testes do motor RD-0124 e foram finalizados em Fevereiro de 2004 nas instalações da Khimavtomatika em Voronezh. Nesta altura previa-se que a produção em série do novo motor teria início em 2005. A 27 de Dezembro de 2005 teve lugar outro teste do motor, abrindo caminho para os ensaios em grupo de todo o terceiro estágio do lançador 14A14-B Soyuz-2-1B nas instalações da NIIKhimMash em Sergiev Posad.
No início de 2005 a Arianespace anunciava que a primeira missão de teste do foguetão 14A14-1B Soyuz-2-1B teria lugar desde o Cosmódromo GIK-5 Baikonur para colocar em órbita o satélite astronómico CoRoT. Este lançamento dependeria dos resultados de novos ensaios do motor RD-0124 que tiveram lugar em Março e Abril de 2006. Um último teste teve lugar a 20 de Outubro de 2006 e o satélite CoRoT acabaria por ser lançado a 21 de Dezembro desse ano.
Dados Estatísticos e próximos lançamentos
– Lançamento orbital: 5444
– Lançamento orbital com sucesso: 5095
– Lançamento orbital Arianespace: 236
– Lançamento orbital Arianespace com sucesso: 227
– Lançamento orbital desde CSG Kourou: 245
– Lançamento orbital desde CSG Kourou com sucesso: 233
– Lançamento orbital desde CSG Kourou em 2015 com sucesso: 4
Ao se referir a ‘lançamentos com sucesso’ significa um lançamento no qual algo atingiu a órbita terrestre, o que por si só pode não implicar o sucesso do lançamento ou da missão em causa.
Dos lançamentos bem sucedidos levados a cabo: 33,3% foram realizados pela Rússia; 38,9% pelos Estados Unidos (incluindo ULA, SpaceX e Orbital SC); 0,0% pela China; 11,1% pela Arianespace; 11,1% pelo Japão, 0,0% pela Índia e 5,6% pelo Irão.
Os próximos lançamentos orbitais previstos são (hora UTC):
28 Mar (1149:00) – PSLV-C27 (PSLV-XL) – Satish Dawan SHAR, Sriharikota Isl., FLP – IRN
30 Mar (1350:00) – CZ-3C Chang Zheng-3C/YZ-1 (Y11) – Xichang, LC2 – Beidou-3 M01
31 Mar (1318:00) – 15A05 Rokot/Briz-KM (4929794554/72526) – GIK-1 Plesetsk, LC133/3 – Gonets-M 21L (Гонца-М 21Л); Gonets-M 22L (Гонца-М 22Л); Gonets-M 23L (Гонца-М 23Л)
15 Abr (2043:00) – Ariane-5ECA (VA222) – CSG Kourou, ELA3 – Thor-7; Sicral-2/Syracuse-3C
17 Abr (????:??) – Falcon-9 v1.1R (F-17) – Cabo Canaveral AFS, SLC-40 – Dragon SpX-6 (CRS6); AggieSat-4; Bevo-2; Arkyd-3-Reflight (A3R); Flock-1e (x28)