
A organização espacial Indiana, ISRO, levou a cabo um novo lançamento orbital colocando em órbita um total de 31 satélites. O lançamento do foguetão PSLV-C38 teve lugar às 0359UTC do dia 23 de Junho e foi levado a cabo a partir da Plataforma de Lançamento FLP do Centro Espacial Satish Dawan SHAR, Ilha de Sriharikota.
Todas as fases do lançamento decorreram como previsto e todos os satélites foram colocados em órbita.
A carga principal desta missão foi o satélite CartoSat-2D, mas para além deste seguiam a bordo do PSLV-C38, na sua versão PSLV-XL, os pequenos satélites NIUSAT (Karalshree), Blue Diamond, Red Diamond, Green Diamond, Venta-1, Max Valier Sat, COMPASS 2 (DragSail-Cubesat, QB50 DE04), InflateSail (QB50 GB06), LituanicaSAT-2 (QB50 LT01), URSA MAIOR (QB50 IT02), NUDTSat (QB50 CN06), Pegasus (QB50 AT03), UCLSat (QB50 GB03), VZLUsat-1 (QB50 CZ02), CE-Sat1, D-Sat, Aalto-1, ROBUSTA-1B, SUCHAI-1, skCUBE, CICERO-6, Tyvak-53b e 8 satélites Lemur-2 (Lemur-2 (34) a Lemur-2 (41)), perfazendo uma carga total de 955 kg.



O CartoSat-2E é a carga principal desta missão. Este satélite é similar aos quatro satélites anteriores da série CartoSat e em especial aos satélites CastoSat-2C, D e E por estar equipado com uma câmara multiespectral. Após a sua colocação na órbita polar sincronizada com o Sol a uma altitude de 505 km, o satélite será colocado na sua configuração operacional após o que começará a fornecer serviços de detecção remota utilizando as suas câmaras pancromáticas e multiespectrais.


As imagens enviadas pelo satélite serão úteis para aplicações cartográficas, aplicações rurais e urbanas, regulação e utilização dos terrenos costeiros, monitorização da rede viária, distribuição da água, criação de mapas de utilização do solo, e aplicações para os sistemas Land Information System (LIS) e Geographical Information System (GIS).
O CartoSat-2E tinha uma massa de 712 kg no lançamento e a sua vida operacional em órbita deverá ser de 5 anos.
 O satélite NIUSAT, também designado Karalshree, foi desenvolvido pela Universidade Islâmica de Noorul, localizada no estado de Tamil Nadu. O NIUSAT é estabilizado nos seus três eixos espaciais, sendo utilizado para a obtenção de imagens multiespectrais para a monitorização das plantações e para aplicação de gestão de desastres naturais. As imagens obtidas têm uma resolução de 25 metros (a uma altitude de 500 km). e cobrem uma área de 50 x 50 km. Tem uma massa de 15 kg e as suas dimensões físicas são 348 x 348 x 370 mm.
O satélite NIUSAT, também designado Karalshree, foi desenvolvido pela Universidade Islâmica de Noorul, localizada no estado de Tamil Nadu. O NIUSAT é estabilizado nos seus três eixos espaciais, sendo utilizado para a obtenção de imagens multiespectrais para a monitorização das plantações e para aplicação de gestão de desastres naturais. As imagens obtidas têm uma resolução de 25 metros (a uma altitude de 500 km). e cobrem uma área de 50 x 50 km. Tem uma massa de 15 kg e as suas dimensões físicas são 348 x 348 x 370 mm.
 O satélite CE-SAT 1 (Canon Electric Satellite 1) é um satélite experimental de observação da Terra desenvolvido e construído pela Canon Electronics Space Technology Laboratory. Com uma massa de cerca de 50 kg, o satélite é construído tendo por base uma estrutura de dimensões 50 × 50 × 70 cm. Está equipado com um sistema de observação óptica num telescópio Cassegrain de 40 cm com um comprimento focal de 3.720 mm e um detector baseado na câmara EOS 5D mk.3. O sistema de imagem fornece uma resolução de 1 metro a uma altitude de 600 km com uma área de 6 x 4 km. O satélite está também equipado com um sistema de remoção orbital experimental.
O satélite CE-SAT 1 (Canon Electric Satellite 1) é um satélite experimental de observação da Terra desenvolvido e construído pela Canon Electronics Space Technology Laboratory. Com uma massa de cerca de 50 kg, o satélite é construído tendo por base uma estrutura de dimensões 50 × 50 × 70 cm. Está equipado com um sistema de observação óptica num telescópio Cassegrain de 40 cm com um comprimento focal de 3.720 mm e um detector baseado na câmara EOS 5D mk.3. O sistema de imagem fornece uma resolução de 1 metro a uma altitude de 600 km com uma área de 6 x 4 km. O satélite está também equipado com um sistema de remoção orbital experimental.
Anteriormente designado Max Valier, o Max Valier Sat é um pequeno satélite de 15 kg construído numa colaboração entre o Gewerbeoberschule “Max Valier” Bozen, o Gewerbeoberschule “Oskar von Miller” Meran e o Amateurastronomen “Max Valier”. A bordo transporta uma carga de astronomia de raios-x e uma carga de rádio amador. O instituto Max Planck Institut für extraterrestrische Physik Garching, fornece o pequeno telescópio µRosi que permite aos astrónomos amadores pela primeira vez observar o céu em comprimentos de onda de raios-x.

O Venta-1 é um pequeno satélite equipado com um sistema Automatic Identification System (AIS) para supervisionar o trafico marítimo na Europa. O satélite foi construído pela Universidade de Ventspils. Os sinais enviados peloo Venta-1 serão recebidos no Centro Internacional de Radioastronomia de Ventspils. Com uma massa de 7,5 kg, o satélite transporta um receptor SATAIS de primeira geração, além de uma pequena câmara e um retrorreflector laser. O satélite é lançado juntamente com o satélite Max Valier Sat, separando-se um do outro em órbita.

Tendo por base a plataforma CubeSat-6U, o CICERO-6 (Community Initiative for Cellular Earth Remote Observation) faz parte de um conjunto de 24 satélites em órbita terrestre baixa para a realização de experiências de ocultação de sinais de GPS e Galileo (GNSS-RO) e tarefas de detecção remota por reflexão GNSS. O sistema de satélites CICERO irá fornecer dados vitais sobre o estado do planeta aos cientistas e governos, incluindo perfis de alta-precisão da pressão atmosférica, temperatura e humidade; mapas tridimensionais da distribuição de electrões na ionosfera; e uma variedade de dados sobre as propriedades dos gelos e dos oceanos. As principais aplicações serão ao nível da previsão meteorológica, investigação climática e monitorização do estado do tempo.

Os satélites Lemur-2 são nano-satélites operados pela Spire Global Inc., São Francisco – EUA, e têm como objectivo fornecer serviços de seguimento de embarcações utilizando o sistema Automatic Identification System (AIS), além de levar a cabo medições meteorológicas utilizando a ocultação das ondas de rádio do sistema GPS. São baseados na plataforma CubeSat-3U e a sua massa é de 4 kg. Os satélites colocados em órbita são o Lemur-2 (34) a Lemur-2 (41).

Os satélites 3 Diamonds são protótipos CubeSat-3U para a constelação Sky and Space Global’s 200 Satellite. Com uma massa de 6 kg, o Blue Diamond, o Green Diamond e o Red Diamond, foram construídos pela GOM Space. A constelação será utilizada para comunicações de banda estreita.

O satélite COMPASS-2 (ou DragSail-Cubesat) tem uma massa de 4 kg e é baseado no modelo CubeSat-3U. O projecto foi desenvolvido pela Fachhochschule Aachen, Alemanha, para propósitos educacionais e demonstração tecnológica. A missão constitui uma modelo experimental universal de satélite, fornecendo subsistemas para a carga tais como energia eléctrica, armazenamento e tratamento de dados, controlo de atitude e comunicações. O módulo 1U central contém os sistemas aviónicos do satélite, enquanto que os restantes dois módulos poderão ser utilizados por empresas e universidades para testar e validar as suas experiências no espaço. Uma das experiências a bordo é a DragSail que será utilizada para aumentar o efeito de arrastamento do satélite para assim permitir uma reentrada controlada na atmosfera terrestre.

Desenvolvido pelo SSC (Surrey Space Centre) na Universidade de Surrey, o InflateSail é um CubeSat-3U com uma massa de 4 kg e constituí uma missão de demonstração tecnológica para a missão QB50. O satélite está equipado com um mastro de 1 metro de comprimento e uma vela solar com uma área de 10 m2 que será utilizada como meio de remoção orbital, sendo este o principal objectivo da sua missão de 3 meses.

O LituanicaSAT-2 é um CubeSat-3U com uma massa de 4 kg desenvolvido pela Universidade de Vilnius, Lituania. Esta é uma missão de demonstração tecnológica como parte de uma rede de 50 pequenos satélites (nanossatélites) QB50 e o seu objectivo é o de levar a cabo medições de longo prazo de parâmetros chave e dos constituintes da baixa termosfera e da ionosfera. O satélite é composto por três módulos: uma unidade científica com o sensor FIPEX (Flux-Φ-Probe Experiment), uma unidade com os sistemas de comando e de aviónicos, e uma unidade de serviço com um sistema de propulsão ‘verde’.

Tendo por base um CubeSat-3U, o satélite URSA MAIOR (University of Rome la Sapienza Micro Attitude In Orbit testing) foi projectado pela Universidade de Roma ‘La Sapienza’ e participa no projecto QB50. O satélite, com uma massa de 3 kg, transporta uma sonda Langmuir para obter uma amostragem da densidade de electrões no espaço em torno do satélite. Para além desta experiência, o URSA MAIOR transporta também a vela ARTICA que será utilizada para remover o satélite da órbita terrestre no final da sua missão. A bordo encontra-se também a experiência MEMIT (MEMS MicroThruster Experiment). A sua missão terá uma duração de cerca de seis meses.

O NUDTSat (National University of Defense Technology Satellite) é um CubeSat-2U para desenvolvimento tecnológico e ciência da alta atmosfera, e foi desenvolvido pela Universidade Nacional de Tecnologia de Defesa, China. Fazendo parte do projecto QB50, o satélite irá obter dados sobre as camadas superiores da troposfera entre os 350 km e 200 km. O satélite, com uma massa de 2 kg, transporta uma unidade cientifica denominada INMS (Ion/Neutral Mass Spectrometer) para obter uma amostragem das partículas ionizadas e neutras de baixa massa na baixa troposfera.
Projectado pela Fachhochschule Wiener Neustadt, Austria, o Pegasus é um satélite participante no projecto QB50. O satélite irá levar a cabo experiências de demonstração tecnológica e investigação termosférica, estando equipado com uma sonda Langmuir para fornecer informações sobre as propriedades essenciais do plasma na termosfera tais como a temperatura dos electrões e densidade. O Pegasus está equipado com uma unidade de propulsão Pulsed Plasma Thruster (PPT) que é composta por quatro PPT miniaturizados. O satélite tem uma massa de 2 kg e a sua missão terá uma duração de seis meses.

O UCLSat (University College London Satellite) é um CubeSat-2U projectado para desenvolvimento tecnológico e investigação da alta atmosfera. O satélite terá uma missão de três meses. Com uma massa de 2 kg, o UCLSat faz parte do projecto QB50 e transporta um Ion and Neutral Mass Spectrometer (INMS), além de um conjunto de sensores para analisar o as partículas energéticas e o ambiente do campo magnético.

Desenvolvido na República Checa, o VZLUSat-1 é um pequeno CubeSat-2U participante no projecto QB50. Tem uma massa de 2 kg e a bordo transporta um telescópio de raios-x miniaturizado além de outros instrumentos para ensaio tecnológico.

O D-Sat (Deorbit Satellite) é um CubeSat-3U com uma massa de 4,5 kg desenvolvido pela empresa Italiana D-Orbit. O satélite tem como missão demonstrar um processo activo de reentrada para o seu final de vida. Utilizando o dispositivo D-Orbit Decommissioning Device (D3), o satélite irá  executar uma rápida e directa manobra de reentrada. Este é um dispositivo compacto e ultra-leve, e de fácil integração nas actuais plataformas de satélite durante a sua fase de projecto e fabrico. O D3 é um dispositivo que é independente dos principais sistemas do satélite, podendo assim operar mesmo no caso de uma grave avaria no satélite. O dispositivo é composto por um pequeno sistema de propulsão projectado para levar a cavo uma única queima de alta potência para assim remover o veículo da órbita terrestre. Para além do D3, o D-Sat transporta a experiência SatAlert, projectada em colaboração com o CNIT e a Universidade de Florença, é uma validação orbital do protocolo de emergência do Multiple Alert Message Encapsulation (MAMES). Ainda a bordo encontra-se a experiência DeCas, desenvolvida pela Aviosonic, tem como objectivo determinar a dinâmica da pegada de detritos associados à reentrada de um satélite, e a experiência Atmosphere Analyzer, que se destina a obter dados atmosféricos da baixa ionosfera durante a manobra de reentrada.
executar uma rápida e directa manobra de reentrada. Este é um dispositivo compacto e ultra-leve, e de fácil integração nas actuais plataformas de satélite durante a sua fase de projecto e fabrico. O D3 é um dispositivo que é independente dos principais sistemas do satélite, podendo assim operar mesmo no caso de uma grave avaria no satélite. O dispositivo é composto por um pequeno sistema de propulsão projectado para levar a cavo uma única queima de alta potência para assim remover o veículo da órbita terrestre. Para além do D3, o D-Sat transporta a experiência SatAlert, projectada em colaboração com o CNIT e a Universidade de Florença, é uma validação orbital do protocolo de emergência do Multiple Alert Message Encapsulation (MAMES). Ainda a bordo encontra-se a experiência DeCas, desenvolvida pela Aviosonic, tem como objectivo determinar a dinâmica da pegada de detritos associados à reentrada de um satélite, e a experiência Atmosphere Analyzer, que se destina a obter dados atmosféricos da baixa ionosfera durante a manobra de reentrada.
A empresa Norte-americana Tyvak Nano-Satellite Systems, Inc., desenvolveu o satélite Tyvak-53B, um CubeSat-3U com a missão de demonstrar a tecnologia utilizada para a remoção orbital de satélites.

Desenvolvido pela Universidade de Aalto, Finlândia, o Cubesat-3U Aalto-1 foi principalmente construído por estudantes universitários. O satélite destina-se à obtenção de imagens da superfície terrestre, à demonstração tecnológica de um pequeno espectómetro de observação e de um detector de radiação para futuros satélites, ao desenvolvimento e demonstração de um dispositivo de remoção orbital para nano-satélites tendo por base uma e-sail, e à promoção da educação em engenharia na Finlândia. O Aalto-1 tem uma massa de 4 kg e a sua missão terá uma duração de 2 anos.

O projecto ROBUSTA (Radiation on Bipolar Test for University Satellite Application) foi desenvolvido pela Universidade de Montpellier II para verificar a deterioração em órbita dos componentes electrónicos baseados em transistores bipolares quando expostos ao ambiente da radiação espacial. Tendo por base o modelo CubeSat-1U, o ROBUSTA-1B tem uma massa de 1 kg.

O SUCHAI (Satellite of the University of Chile for Aerospace Investigation) é o primeiro CubeSat-1U do Chile desenvolvido por alunos, professores e engenheiros da Electrical Engineering, Physics and Mechanical Engineering Departments of the Faculty of Physical and Mathematical Sciences (FCFM) da Universidade do Chile. O satélite transporta uma sonda Langmuir, uma experiência térmica, uma câmara digital e um receptor GPS. O satélite tem uma massa de 1 kg.

Desenvolvido pela Organização Eslovaca para as Actividades Espaciais, o skCUBE é um CubeSat-1U com propósitos educacionais, sendo o primeiro satélite Eslovaco. Com uma massa de 1 kg, o satélite transporta um repetidor digital em UHF, um farol CW em HUF e um sistema de observação.

A informação sobre os satélites secundários foi fornecida pelo portal Gunter’s Space Page.
Lançamento
A ignição do primeiro estágio ocorre a T=0s com os propulsores laterais de combustível sólido a entrarem em ignição aos pares e de forma sequencial: os propulsores 1 e 2 entram em ignição a T+0,42s, os propulsores 3 e 4 a T+0,62s e os propulsores 5 e 6 a T+25,0s, com o veículo já em voo e após deixar a plataforma de lançamento.
A separação dos propulsores 1 e 2 ocorre a T+1m 9,90s, seguindo-se a separação dos propulsores 3 e 4 a T+1m 10,10s e finalmente a separação dos propulsores 5 e 6 a T+1m 32,00s. O lançador continua a ascensão propulsionado pelo primeiro estágio até T+1m 50,26s, altura em que este se separa. A ignição do segundo estágio ocorre a T+1m 50,46s.
A separação da carenagem de protecção ocorre a T+2m 38,96s, pois é agora desnecessária e representa um peso extra para o lançador, sendo assim descartada a uma altitude de 121,68 km e a uma velocidade de 2,46 km/s. A separação é sequencial com a quebra pirotécnica das ligações entre as duas metades da carenagem de protecção e de seguida, pela actuação de molas, a carenagem separa-se do veículo.
Terminada a queima do segundo estágio, este separa-se a T+4m 21,72s, com a ignição do terceiro estágio a ocorrer a T+4m 22,92s. Finalizada a queima do terceiro estágio, este separa-se a T+8m 12,22s, entrando num voo balístico até à ignição do quarto estágio a T+8m 21,22s. Este termina a sua queima a T+15m 58,94s, a uma altitude de 509,85 km e a uma velocidade de 7,60 km/s.
A separação do satélite CartoSat-2E ocorre a T+16m 40,94s, seguindo-se o satélite NIUSAT a T+17m 0,94s e os restantes satélites entre T+17m 0,94s e T+23m 18,94s.
O foguetão PSLV
O foguetão PSLV (Polar Satellite Launch Vehicle) foi desenhado e desenvolvido pelo ISRO para colocar em órbita polar sincronizada com o Sol, satélites com um peso máximo de 1.000 kg da classe IRS. Segundo dados fornecidos pelo ISRO, desde o seu primeiro voo em Outubro de 1994 a capacidade do PSLV foi aumentada de 850 kg para os actuais 1.400 kg para uma órbita sincronizada com o Sol a 820 km de altitude. O lançador demonstrou também uma capacidade múltipla no lançamento de diferentes satélites.

O PSLV foi desenvolvido no Centro Espacial Vikram Sarabhai, Thiruvananthapuram. O sistema de inércia foi desenvolvido pela unidade IISU (ISRO Inertial Systems Unit), localizado também em Thiruvananthapuram. O Centro de Sistemas de Propulsão Líquida desenvolveu os estágios de propulsão líquida bem como os sistemas de controlo de reacção. O Centro Espacial Satish Dawan, SHAR, processa os motores de combustível sólido e leva a cabo as operações do lançamento.

A melhoria das capacidades do PSLV foi conseguida através de vários meios: aumento da capacidade de carga de propolente no primeiro, segundo e quarto; melhoria na performance do motor do terceiro estágio ao se optimizar o motor e a carga de combustível; e introdução de um adaptador de carga de material compósito carbónico. A sequência de ignição dos propulsores laterais foi também alterada. Anteriormente dois dos propulsores entravam em ignição na plataforma de lançamento e os restantes quatro entravam em ignição com o veículo á em voo. Esta sequência foi alterada, entrando em ignição no solo quatro propulsores e os restantes dois entram em ignição com o veículo já em voo.


De forma geral, o PSLV tem uma altura de 44,4 metros, um diâmetro base de 2,8 metros e um peso de 294.000 kg. O PSLV é um lançador a quatro estágios, sendo o segundo e o quarto estágios a combustível líquido e os restantes a combustível sólido. O PSLV é capaz de colocar 3.700 kg numa órbita terrestre baixa a 200 km de altitude com uma inclinação de 49,5º em relação ao equador terrestre ou então 800 kg numa órbita de transferência para a órbita geossíncrona.
O quadro mostra as características do PSLV-C37 (massa no lançamento: 320.000 kg, altura: 44,4 metros).

O primeiro estágio PS1 é um dos maiores estágios a combustível sólido actualmente existente, transportando 138.000 kg de HTPB (Hydroxyl Terminated Poly Butadiene). Tem um peso bruto de 210.000 kg (138.000 kg referentes ao corpo central juntamente com 72.000 kg referentes a seis propulsores laterais PSOM-XL com uma massa de 12.000 kg cada um) e desenvolve uma força de 4.787 kN no lançamento, tendo um Ies de 269 s (Ies-nm de 237 s) e um Tq de 102 s (os propulsores laterais de combustível sólido tem um Tq de 49 s). O seu comprimento total é de 20,3 metros e o seu diâmetro é de 2,8 metros, com os propulsores laterais a terem um diâmetro de 1,0 metros e um comprimento de 12,4 metros. Em torno do primeiro estágio estão colocados seis propulsores de combustível sólido. Destes seis propulsores, quatro entram em ignição no momento T=0, aumentando a força inicial do primeiro estágio.
O segundo estágio PS2 emprega o motor Vikas, desenvolvido pela Índia, e transporta 40.000 kg de UDMH e N2O4. Tem um comprimento de 12,8 metros, um diâmetro de 2,8 metros e é capaz de desenvolver 804 kN no lançamento, tendo um Ies de 293 s e um Tq de 148 s. Este segundo estágio tem um peso bruto de 45.800 kg e um peso de 5.300 kg sem combustível.
O terceiro estágio PS3 utiliza combustível sólido. Tem um comprimento de 3,6 metros e um diâmetro de 2,0 metros, sendo capaz de desenvolver 242 kN no lançamento, tendo um Ies de 294 s e um Tq de 110 s. Tem um peso bruto de 8.400 kg, pesando 1.100 kg sem combustível. O compartimento do motor é fabricado à base de fibra de poliaramida.

O quarto estágio PS4 utiliza dois motores de combustível líquido que consomem MMH (Mono Metil Hidrazina) e MON (Mixed Oxides of Nitrogen). Tem um comprimento de 2,9 metros e um diâmetro de 2,8 metros, atingindo uma envergadura de 2,0 metros e sendo capaz de desenvolver 7,3 x 2 kN no lançamento (Ies de 308 s; Tq de 515 s). Tem um peso bruto de 2.920 kg, pesando 920 kg sem combustível.
A carenagem de protecção dos satélites tem um diâmetro base de 3,2 metros, podendo no entanto ser utilizadas outras variantes desta carenagem.
O primeiro lançamento do PSLV (PSLV-D1) teve lugar a 20 de Setembro de 1993 (0512UTC) e acabou num fracasso (1993-F03), falhando a colocação em órbita do satélite IRS-1E. A primeira missão com sucesso teve lugar a 15 de Outubro de 1994 (0505UTC) quando o foguetão PSLV-D2 colocou em órbita o satélite IRS-P2 (23323 1994-068A).
O PSLV utiliza um grande número de sistemas auxiliares para a separação dos estágios, separação da ogiva de protecção, etc. Estes sistemas estão divididos pelos diferentes estágios:
• 1º Estágio: sistema SITVC (Secondary Injection Thrust Vector Control) para controlo de translação, e motores de reacção para controlo da rotação;
• 2º Estágio: movimentação do motor para controlo de translação e motor de controlo da rotação;
• 3º Estágio: escape (tubeira) flexível para controlo de translação e sistema de controlo de reacção PS-4 para controlo da rotação;
• 4º Estágio: movimentação do motor para controlo de translação e sistema de controlo de reacção reactivável para controlo de atitude.
O sistema de navegação inercial localizado no compartimento de equipamento no topo do quarto estágio guia o lançador desde o seu lançamento até à injecção do satélite em órbita. O veículo possui instrumentação para monitorizar a sua performance durante o voo. O sistema de detecção fornece informação em tempo real sobre o desempenho do veículo permitindo uma segurança do voo e permite a determinação da órbita preliminar na qual o satélite é colocado.
A versão PSLV-CA (CA – Core Alone) foi desenvolvida a partir da versão standard do lançador PSLV-C e é seleccionada tendo em conta o peso das cargas a ser colocadas em órbita. Esta versão tem uma massa de 230.000 kg no lançamento.
Dados estatísticos e próximos lançamentos
– Lançamento orbital: 5636
– Lançamento orbital Índia: 60
– Lançamento orbital desde Satish Dawan SHAR: 60
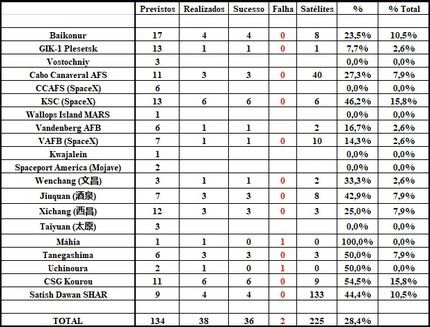

Dos lançamentos bem sucedidos levados a cabo em 2017: 11,1% foram realizados pelos Estados Unidos (incluindo ULA – 100,0% (4) e Orbital ATK – 0,0%); 19,4% (7) pela China; 13,9% (5) pela Rússia; 16,7% (6) pela Arianespace; 11,1% (4) pela Índia; 8,3% (3) pelo Japão e 19,4% (7) pela SpaceX.
Os próximos lançamentos orbitais previstos são (hora UTC):
23 Jun (1804:39) – 14A15 Soyuz-2.1V/Volga – GIK-1 Plesetsk, LX43/4 – 14F150 n.º 2 (?)
23 Jun (1810:00) – Falcon-9 (reused 1st stage B1029) – CE Kennedy, LC-39A – BulgariaSat-1
25 Jun (2024:59) – Falcon-9 – Vandenberg AFB, SLC-4E – Iridium NEXT (x10)
28 Jun (2145:07) – Ariane-5ECA (VA238) – CSG Kourou, ELA3 – Inmarsat-S / Hellas-Sat 3 (Europasat); GSat-17
02 Jul (????:??) – CZ-5 Chang Zheng-5 (Y2) – Wenchang, LC101 – SJ-18 Shijian-18